Nuclear Plant Journal, May-June 2014 NuclearPlantJournal.com
41
Nuclear Plant Journal Advertiser Web Directory
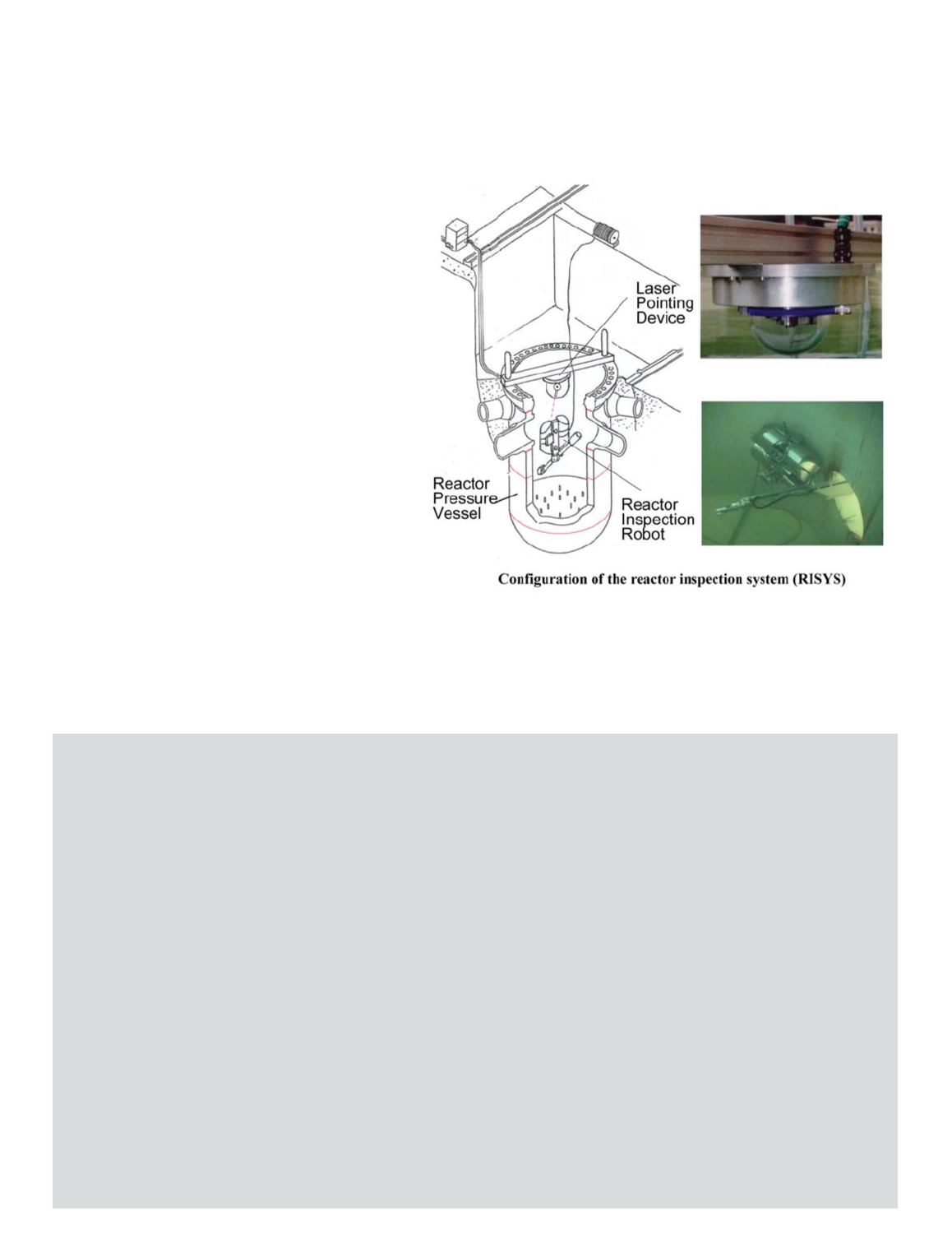
When the laser beam points to a
specific position on the PSD surface, the
sensor generates currents corresponding
to the deviation of the laser spot with
respect to the center of the PSD. We
control the robot in such a way that the
deviations of the laser spot become equal
to zero. More complex calculations are
needed to inspect the welds near a nozzle
using a mobile robot than the other welds
in a reactor vessel. When inspecting the
welds around a nozzle, the robot moves
around this nozzle.
The function of the main control
computer is to control the RIROB, the
laser pointing device and the sonic data
acquisition subsystem. It is a PC based
control station with operating software
and interfaces. It has the geometric
information of all reactor vessels
operating in Korea, so that inspections
can be planned and simulated on a 3D
graphic display.
During inspection, the main control
system generates the scan path for the
RIROB to move along. Simultaneously,
the current posture of the robot is
displayed graphically and the image
captured by the camera on the robot is also
displayed. After inspection, examination
reports are generated using the stored
data. The system can also be operated in
a manual mode during a computer control
malfunction.
The computer software includes other
convenient modules: an input module
of reactor specifications, an inspection
procedures module, a selection of
inspection items, an automatic location of
the inspection robot, previous simulations
of the robot movements, a display of the
inspection status, communication with
the RIROB, laser pointing device and
the sonic data acquisition subsystem
and a fully automatic inspection and
manual inspection. The data acquisition
subsystem drives the ultrasonic sensor,
and collects, displays and stores the
reflected signal data.
Robotic Inspection
In order to confirm the integrity of
our developed inspection system, we have
performed a series of experiments in the
American Crane & Equipment
Corporation
AREVA Inc.
Birns
CB&I
Diakont
G. D. Barri & Associates, Inc.
GE Hitachi Nuclear Energy
HF Controls
HukariAscendent
HydroAire Service, Inc.
InterTest, Inc.
Konecranes Nuclear Equipment
& Services, LLC
Nuclear Information and
Records Management
Association (NIRMA)
www. nirma.org
OTEK Corporation
Siempelkamp Nuclear Services,
Inc
.
Tecnatom, s.a.
Thermo Scientific- CIDTEC
UniTech Services Group
Uticom Systems, Inc.
Westinghouse Electric
Company LLC
Zachry Nuclear Engineering,
Inc


